电 话:021-39526589
网址:www.qiant.net
地 址:上海嘉定区嘉涌路99弄6号楼713室
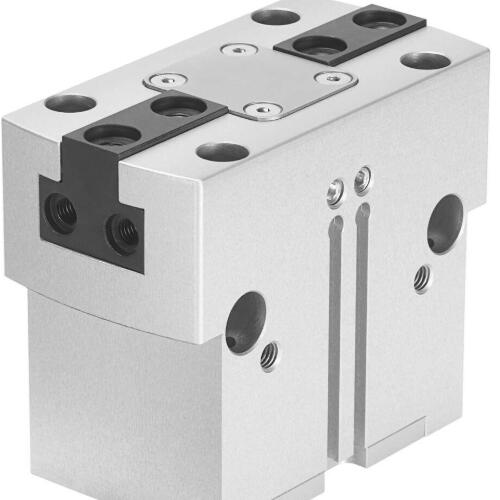
销售DHPS-35-A费斯托平行抓手
特点详情:
连接电缆NEBU6 • 连接信号转换器和控制器 21
[2] 连接电缆NEBU6 • 连接位置传感器和信号转换器 21
[3] 信号转换器SVE46 • 用于评估信号,用于位置传感器 SMH-S1 21
[4] 位置传感器SMH-S16 • 可调整和可集成的传感器技术,用于感测活塞位置 21
[5] 定位套ZBH6 ... 35 • 用于将气爪手位在夹爪上
所示打开和合拢时间[ms]测量条件为:室温、工作压力
6 bar 、气爪水平安装、不带附加气爪手指。用于更大负载[g]时,气爪必须节流。

随后必须相应地调节打开和合拢时间。
• 规格10及以上的气爪供货范围内包括4定位套
所示的许用力和扭矩适用于单个夹爪。包括杠杆臂、由工件或外
部气爪手指造成的额外应用负载以及运动时产生的加速度和力。
计算扭矩时,必须考虑零点坐标系(夹爪导轨)。
气爪采用滑动轴承导轨,夹爪和壳体之间存在回转间隙。表中的回转间隙数值采用传统的累加公差方法计算而来。
每个爪手夹爪的行程 12.5 mm
替换精度 ≤0.2 mm
每个外部爪手夹爪的质量 450 g
工作介质 压缩空气,符合 ISO 8573-1:2010 [7:4:4]
工作和先导介质说明 可用润滑介质工作(之后须一直润滑介质工作)
耐腐蚀等级 CRC 1 - 耐腐蚀能力
环境温度 5 °C ... 60 °C
每个爪手夹爪的抓取力,打开,6 bar 483 N
摆动爪手夹爪的间隙 ax、ay <0.5 deg
旋转对称 ≤0.2 mm
重复精度,爪手 <0.02 mm
销售DHPS-35-A费斯托平行抓手
021-39526589
网址:www.qiant.net
地 址:上海市嘉定区嘉涌路99弄
6号楼713室










 旺旺
旺旺